Kako odrediti koji DC motor drajver koristiti za dati DC motor?
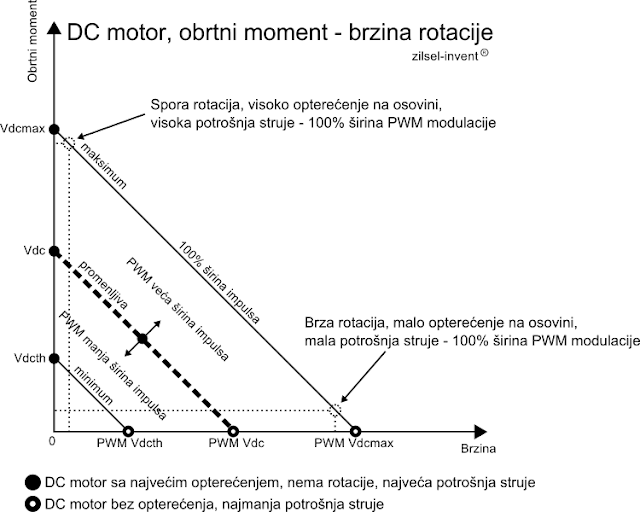
UVOD Izbor DC motor drajvera se vrši na osnovu potrošnje DC motora pri određenim uslovima rada. Da bi odredili potreban DC motor drajver potrebno je posmatrati dijagram odnosa obrtnog momenta i brzine rotacije DC motora. DC motor – obrtni moment i brzina rotacije Zapravo stvari su jednostavne, sve što je potrebno da imate ispred sebe je dijagram odnosa obrtnog momenta i brzine rotacije DC motora, pri čemu je dovoljno da imate generalni dijagram, tj. ne od određenog modela DC motora, mada za svaki pojedinačno možete pronaći specifikaciju koja prikazuje pomenute odnose, slika 1. Iz dijagrama vidimo da je isti prikazan za širinsko impulsnu modulaciju ili ti PWM modulaciju. Da bi odredili koji nam je DC motor drajver potreban za dati DC motor potrebno je posmatrati 100% širinu impulsnog signala preko kog se DC motor napaja. Sa dijagrama možemo videti sledeće: ukoliko imamo impulsnu širinu signala od 100% pri maksimalnom opterećenju na osovini DC motora onda ...

